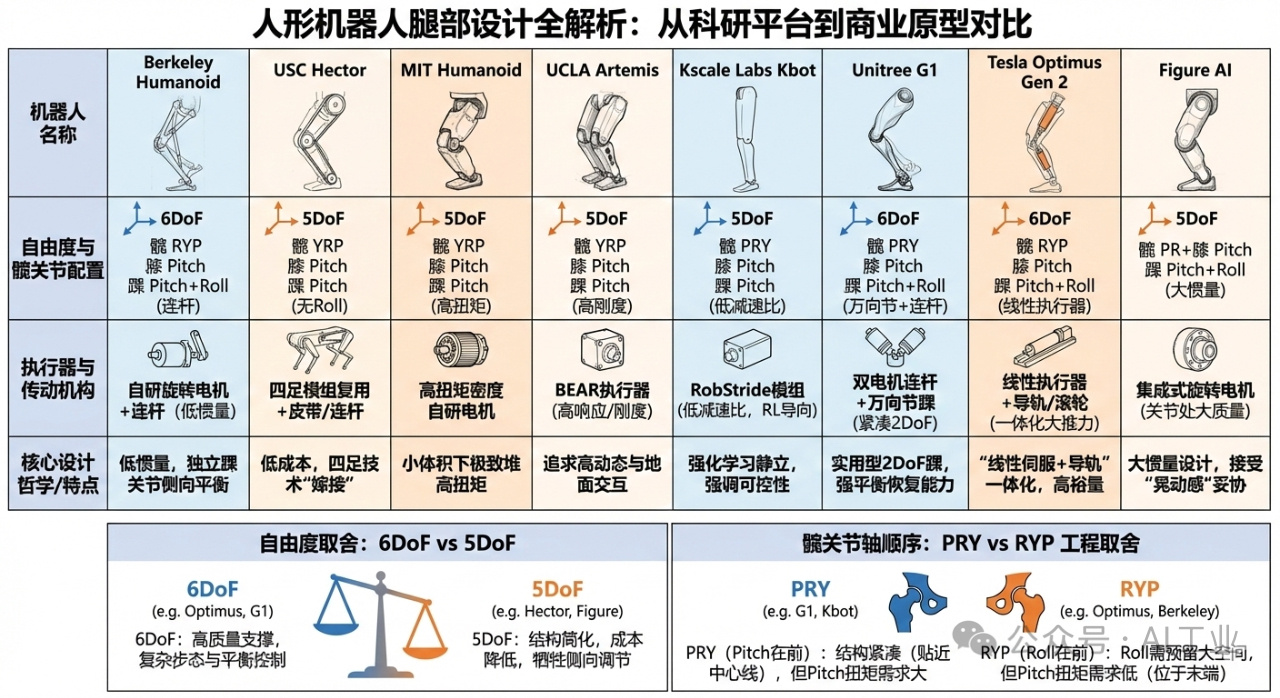
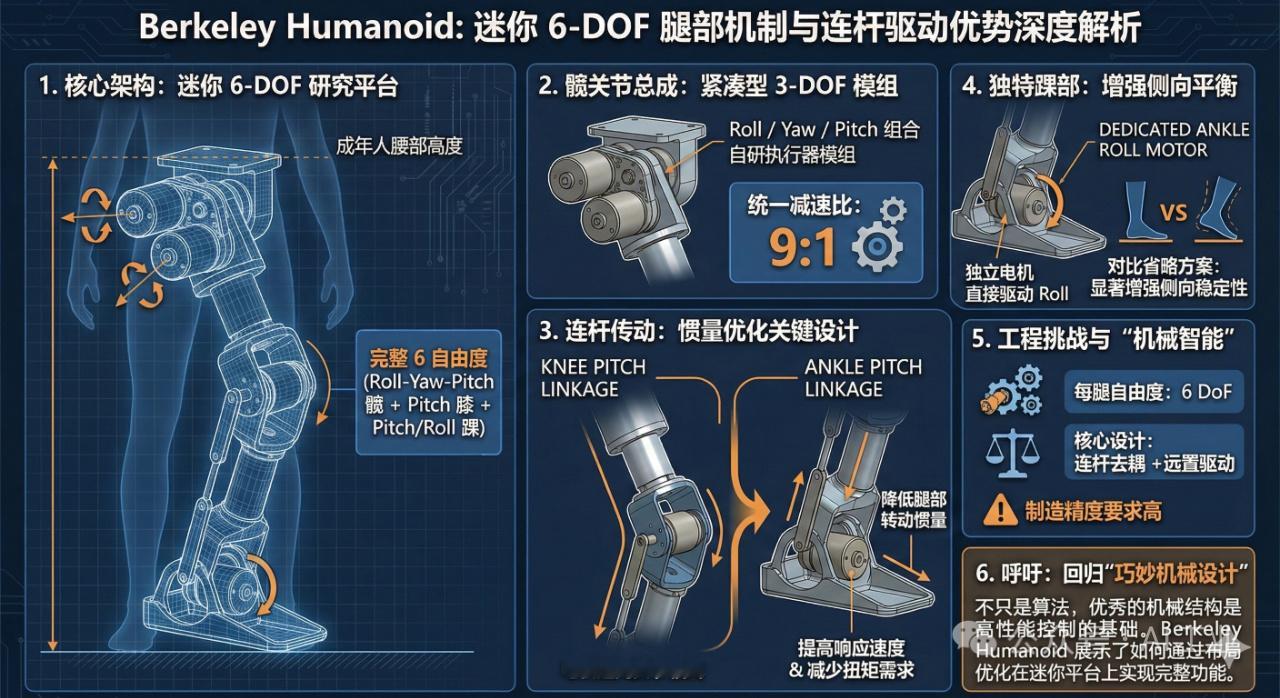
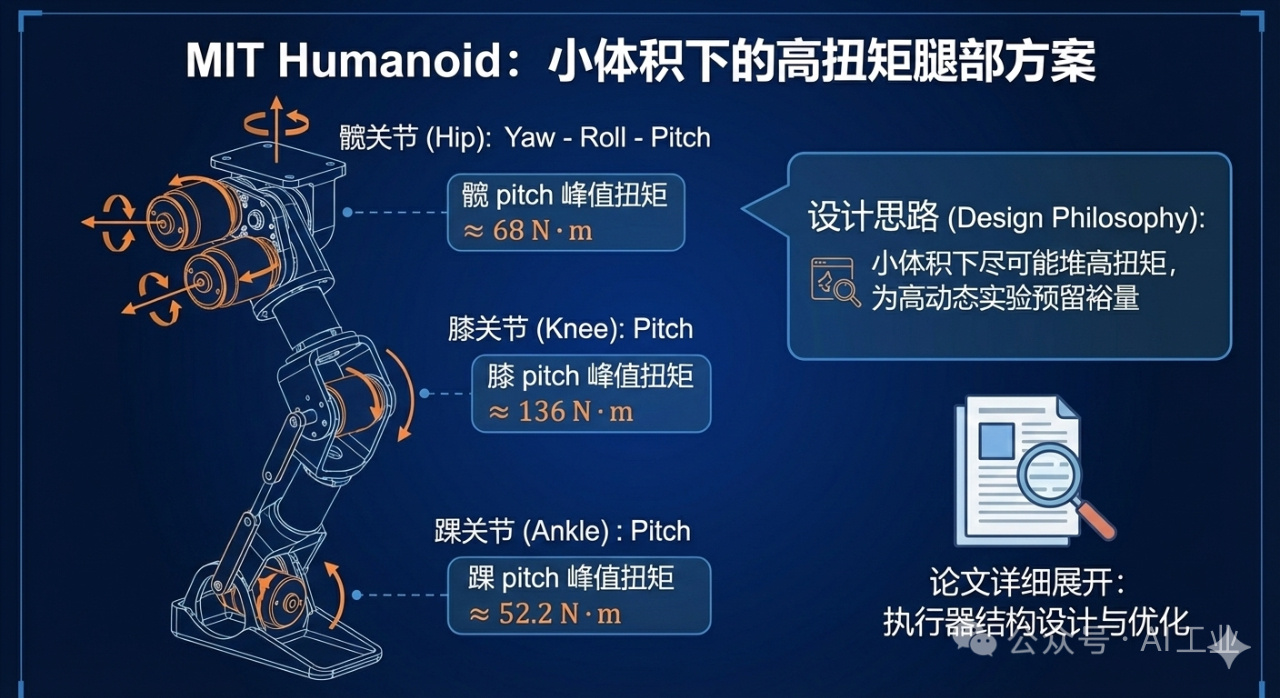
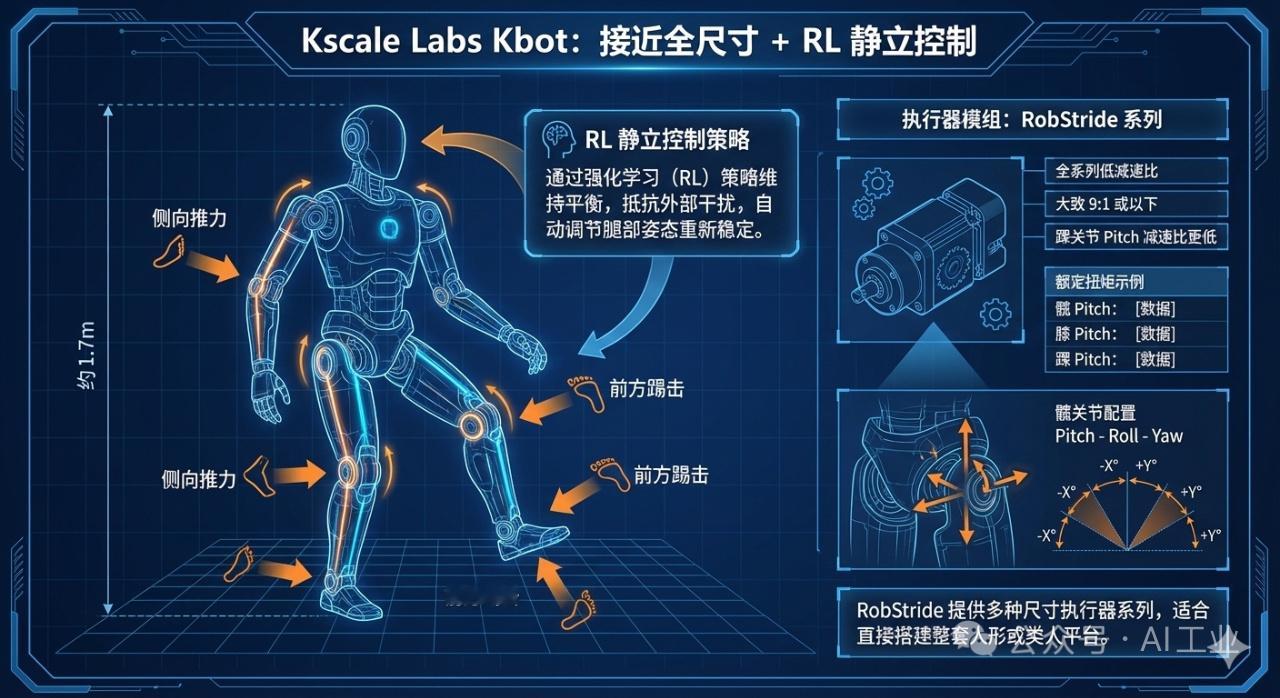
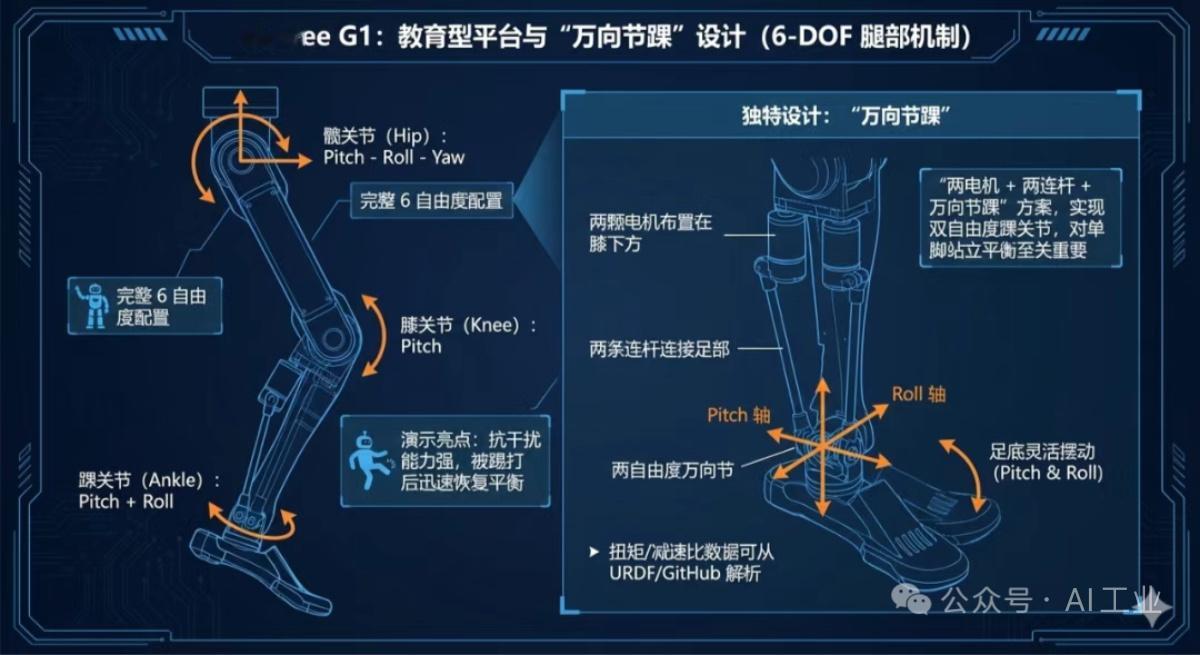
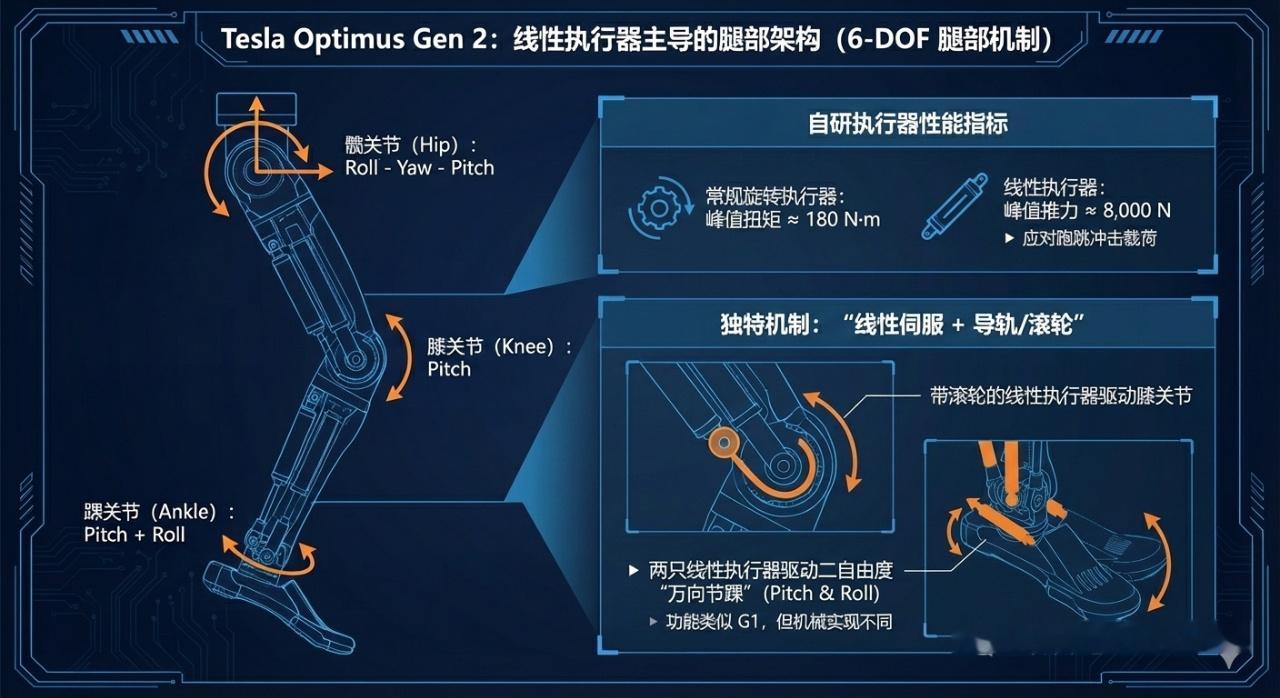
人形机器人腿部的设计形式非常多样。视频里依次梳理了几种典型的人形腿部方案:包括 UCLA Artemis、MIT Humanoid、Berkeley Humanoid、USC Hector 等科研平台,以及 Tesla Optimus、Figure Helix、Unitree G1、Kscale Labs Kbot 等更偏产业化的机器人。整体目标是,让观众弄清这些机器人在关节配置(joint configuration)、执行器选择(actuator)、减速比(gear ratio)和驱动机构(driving mechanism)上的差异。特斯拉发布人形机器人跑步视频