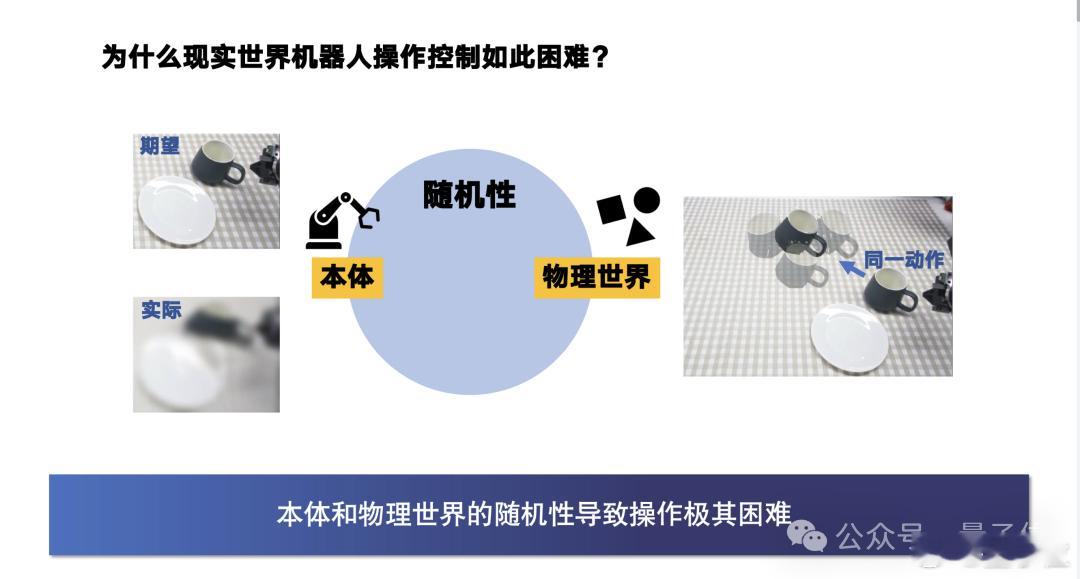
自变量机器人CEO最新演讲MEET2026智能未来大会 过去一年,具身智能领域反复被问到一个问题:它到底只是多模态模型的一个应用,还是一种全新的基础模型?对此,自变量机器人创始人兼CEO王潜表示:具身智能模型是物理世界的基础模型,独立于、平行于语言模型、多模态模型等虚拟世界的模型。这一判断背后,首先是对物理世界与虚拟世界本质差异的重新认识。语言模型和多模态模型所面对的,是高度可复现、低随机性的符号世界;而机器人所处的物理世界,则充满连续性、随机性、不完全可观测性以及大量与力、接触和时序强相关的过程。沿用以语言和视觉为中心建立起来的建模范式,本身就存在结构性的错位。也正因为如此,自变量机器人在实践中选择了一条更长期的路线:不把具身智能当作应用层问题,而是从模型架构、数据范式、推理方式乃至硬件形态上,系统性地重做一套“物理世界的智能底座”。为了完整体现王潜的思考,在不改变原意的基础上,量子位对演讲内容进行了编辑整理,希望能给你带来更多启发。网页链接