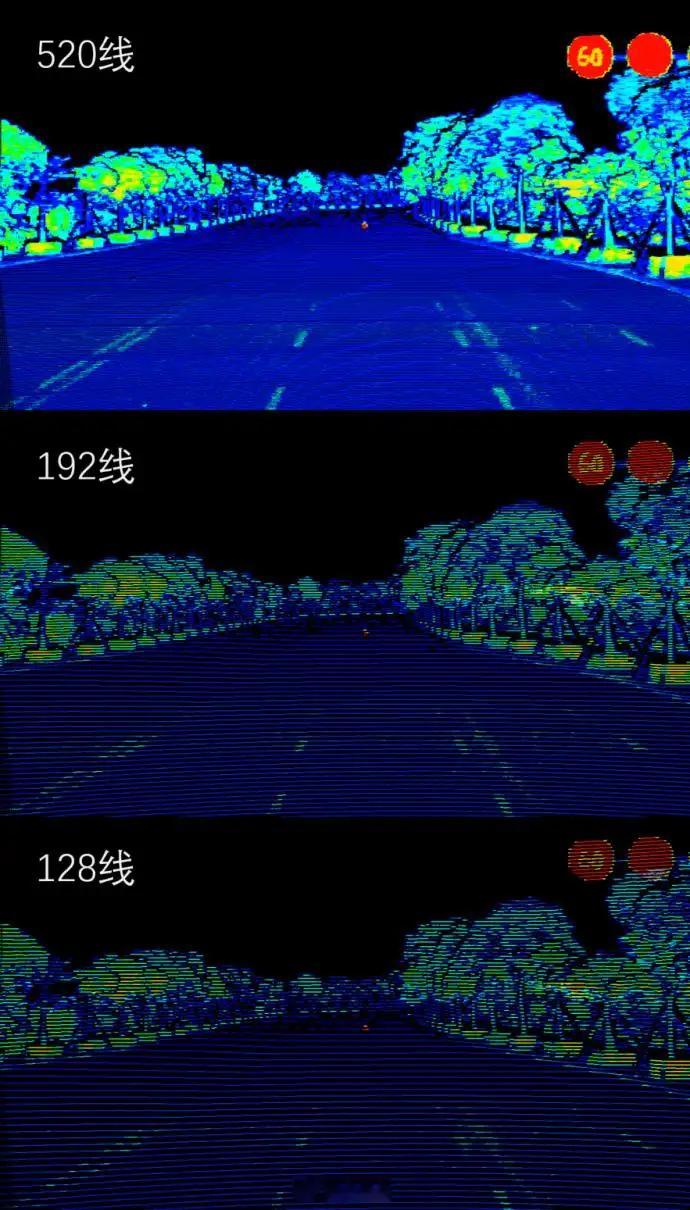
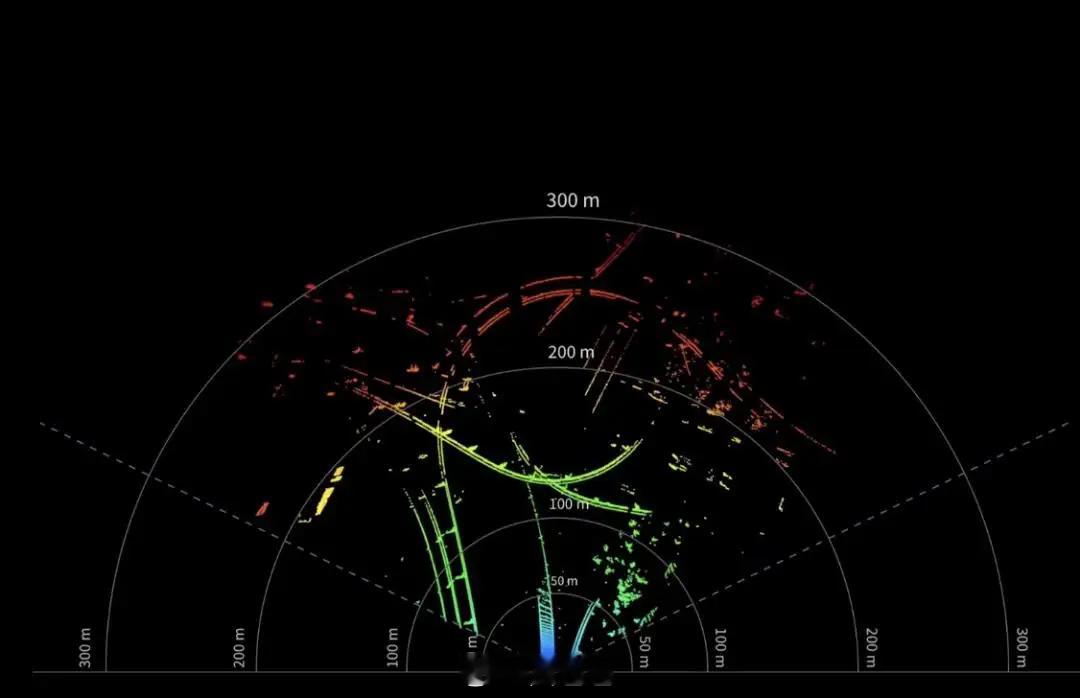
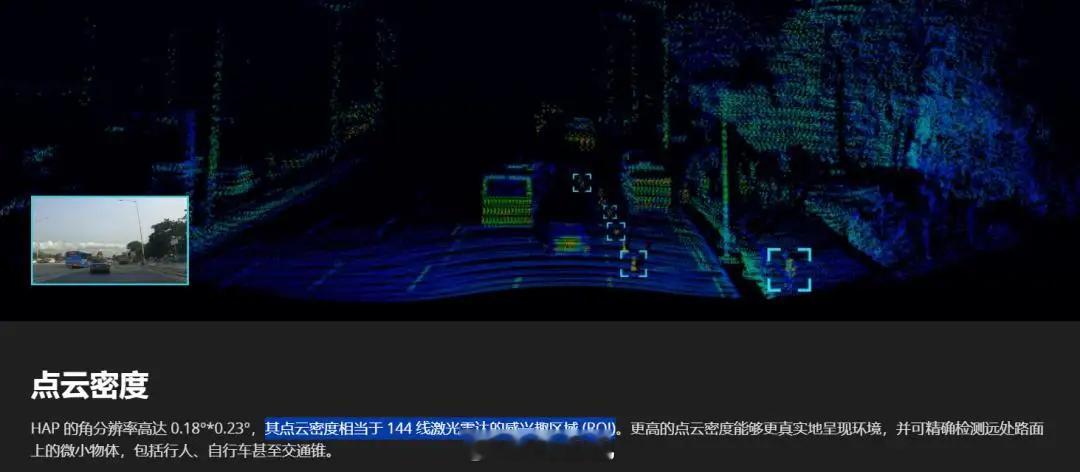
自动驾驶激光雷达成包包的思考 新能源汽车 Counterpoint Research在报告中表示,到2035年,全球高级驾驶辅助系统(ADAS)和自动驾驶(AD)传感器市场预计将达到610亿美元。该机构预计,激光雷达和成像雷达预计仍将是价值增长最快的细分市场之一,到2035年,二者合计市场规模预计将达到280亿美元,因为汽车制造商正在寻求更高分辨率的感知和冗余技术,以用于更高级的自动驾驶功能。今天来和大家说说机械、半固态、全固态激光雷达有何区别?我觉得在说清楚机械,半固态,全固态激光雷达的区别之前有必要先搞清楚衡量激光雷达的性能指标:一、线数:这是我们经常听到的激光雷达宣传指标,我们知道激光雷达的工作原理是通过测量激光发射和反射回来的时间差,从而计算车辆与障碍物的距离。伴随着激光束数量增加,我们就能获取更多的距离数据。而通过激光扫描,就得到障碍物的位置信息和轮廓,并分辨其类型。简单说:线数越多,越能准确识别较细小物体早年的车载激光雷达是4线,现在128线,192线也比较常见了,甚至还有520线。图1二、探测角度和距离这个应该也非常好理解,一个广度,一个深度,这组合在一起就代表着激光雷达所能探测的范围,探测距离越长,系统做出响应的时间就越充分,探测角度越大,看得越远,则意味着盲区更小。图2三、角分辨率指的是激光雷达系统在水平和垂直方向上能够区分和感知到的最小角度变化能力,简单地说就是激光雷达在空间中识别细节的精细程度。分辨率直接决定了生成的点云密度。更高的角度分辨率(更小的角度值)意味着在同等距离内扫描的点更多、更密集。图3了解了上述激光雷达的性能指标,我们再来看看激光雷达的分类:首先是机械激光雷达,此类激光雷达的发射器和接收器都安装在旋转部件上,能通过电机和转台带动光机结构整体 360° 旋转,因此能对周围环境进行横向全方位的扫描。其核心优势就在于360度无死角的感知,但同时其复杂结构使生产流程长,还需要繁琐的人工装配和调试,导致制造成本居高不下,量产难,且容易损坏。图4所以我们经常能看到他被大量应用于自动驾驶的测试车辆,而非量产车型。图5其次是半固态激光雷达,这也是目前量产车型上的主流应用,也就是我们目前看到很多车型车顶位置上的“犄角”。图6之所以将其称之为半固态,大家千万不要把他对应到电池(液态,半固态,固态)电解质那一Part的逻辑,所谓“半固态”,指的是它不像传统机械式激光雷达那样整个雷达都要机械旋转,而是把真正发射和接收光线的核心模块固定住,只让一些小的部件做机械运动。这样的设计使得它的运动部件相比传统机械雷达少得多,所以结构更简单、更稳定。半固态激光雷达常见的一种实现是转镜结构,也就是说发射/接收模块本身不动,但配合一个小的机械镜子去改变激光束的方向,这样可以做到比纯固态更灵活的扫描,但运动量远小于整个模块旋转一圈。这种方式减少了机械部件的数量和运动范围,所以相比机械式激光雷达来说,他是目前车企找在性能、成本和车规可行性之间找到的的平衡点,也是其成为量产车主流选择的原因。图7但半固态劣势同样也明显,因为只有部分器件可运动,半固态激光雷达的探测角度有限,一般是横向120°,垂向20°以上。车企们通常把它放在车头,车侧和车尾的盲区则需要用毫米波雷达和摄像头来补齐。最后是全固态激光雷达,意味着彻底消除机械结构,即完全没有任何运动部件,扫描由电信号完成,是激光雷达的「纯电子化」形态,依靠半导体技术实现光束的发射、扫描和接收。其优点不言而喻,全固态的结构最为简单,因体积更小,可靠性更高,成本也更低。但是其劣势同样明显,全固态雷达在 10% 反射率下的探测距离仅 25–30 米,难以肩负主前向探测,通常用于车侧、车尾补盲。图8所以很多车企都采用1颗高性能半固态+4颗全固态辅助补盲的组合方案。图9所以机械激光雷达其实更偏向于工程应用,而半固态和全固态的组合则更偏向于量产应用。