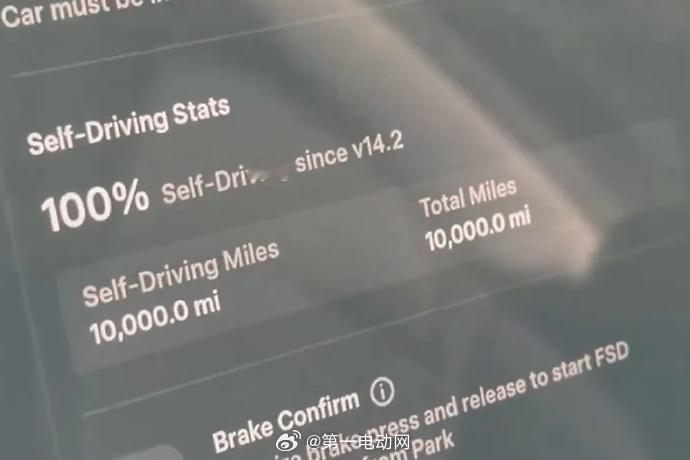
一位特斯拉车主 David Moss 使用 FSD v14.2.1.25,从洛杉矶一路开到南卡 Myrtle Beach,横贯美国 4397 公里,全程 0 人工干预,用时 2 天 20 小时。特斯拉FSD自动驾驶 这件事的意义,不在于“又一次成功案例”,而在于它发生在真实高速、公路、城市道路混合场景下,而且是长时间、跨州、跨气候条件的连续运行。对自动驾驶来说,这比单点路测或短视频展示更接近真实使用环境。这并不是一条“理想路线”。由于大量高速路段缺乏超充站,他为提高 FSD 运行比例,选择全程依赖超充,实际覆盖的是一条高速 + 城市道路 + 超充停车场的混合路径,累计超过 4000 公里。从辅助驾驶评测角度看,这是对模型泛化能力的极限压力测试,而不是单一场景刷成绩。更重要的是,这个挑战本身有明确的历史背景。“海岸到海岸”并非临时起意,而是 2016 年马斯克为 FSD 团队设定的年度目标,并对外公开承诺。今天完成,已经是一个迟到 8 年的兑现。事后看,这个目标之所以难,是因为它本质上在验证:一个模型能否在一个幅员辽阔、道路规则高度多样的大国连续运行。多位前 FSD 团队成员的反应,也说明了这件事的分量。Andrej Karpathy 提到,海岸到海岸从一开始就是 FSD 的核心目标,过去大量工作都围绕“分析每一次干预、逐个解锁场景”。他也再次重申一个判断:Waymo 的难点在硬件,特斯拉的难点在软件,而软件问题长期看更容易规模化解决,并直言当前 Waymo 很难完成同样的挑战。前 FSD 规控负责人 Paril Jain 的评价更直接:关键不在“有没有自动驾驶车”,而在是否跑在用户的真实车辆上,而不是受控 Demo 车上。对机器人和自动驾驶行业来说,靠过拟合和精心剪辑的视频无法建立真正的信任,用户真实使用的数据才是唯一有效的证明。还有一个容易被忽略的细节:洛杉矶只是“横贯美国”的起点,David Moss 实际从西雅图出发,总里程已超过 1.6 万公里 0 接管。第三方平台 Teslascope 指出,这些遥测数据是端到端记录的,只要有一次人工接管,就不可能维持 100% 比例。这件事未必意味着“自动驾驶已经完成”,但它至少说明:在真实用户、真实道路、长时间连续运行条件下,FSD 已经触碰到了一个过去多年无法跨越的门槛。



![比亚迪插混的一年两箱油与燃油车的一年两箱油![呲牙笑]](http://image.uczzd.cn/17180191038638947916.jpg?id=0)




